RAMAC Example on Simulated CT images
In this guide, we present a comprehensive overview of the Registration-based Automated Matching and Correspondence (RAMAC) package, including a detailed explanation of its functionality and a step-by-step guide on how to use it effectively.
Test Case Setup
Utilize the RAMAC repository to facilitate ROI correspondence and matching in your volumetric image dataset. The package requires two volumetric images and their respective ROI coordinate information provided in CSV files as inputs.
To illustrate the functionality of the RAMAC package, we provide a test case using a dummy Sheplogan phantom. This phantom serves as the original dataset, with lesion coordinates designated as regions of interest (ROI). Here’s how the test case is set up:
The Sheplogan phantom is generated using the (termed as original phantom here) using the Phantominator package. lesion cooridnates are placed as region of interest (ROI).
The generated phantom is converted to SimpleITK (SITK) format for compatibility with registration.
A known transformation is applied to create a transformed phantom and corresponding ROI coordinates.
The ROI coordinates of the
original(fixed) andtransformed(moving) phantoms are stored in comma-separated values (CSV) files for further analysis.
Usage
Data Generation
At first a dummy Sheplogan phantom using Phantominator is generated and converted to SimpleITK format.
Then a known transformation is applied to create a transformed/ moving phantom and corresponding ROI/landmark coordinates of the moving image are obtained.
Next we save the ROI coordinates in CSV format for later use.
Registration
Optionally, preprocessing can be required on images to mask out air voxels.
Then 3D rigid registration between the
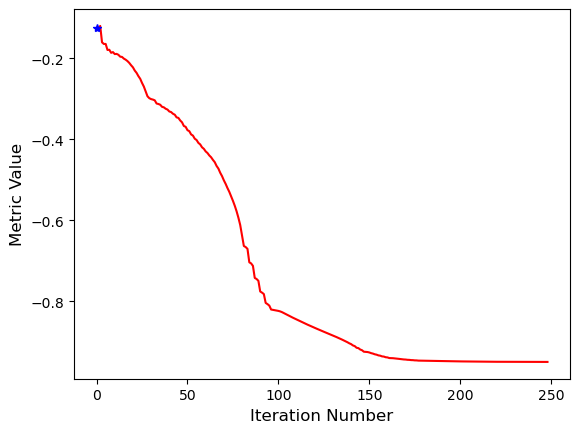
original(fixed) andtransformed(moving) phantom usingStepGradientDescentoptimizer with specified parameters is conducted.We monitor optimizer progress and convergence at each iteration and output the registered image.
Finally, we apply the
registered transformation matrixto the ROI coordinates of the transformed phantom so as to obtain theregistered_coordinatesand save inresultfolder in comma-separated values (CSV) file format.
Adaptive Hungarian
Next, we establish correspondence between ROI coordinates of the original and registered images using the adaptive Hungarian algorithm.
This algorithm takes as input the ROI cooridnate information from the stored comma-separated values (CSV) files.
Then we visualized the corresponding and unmatched ROI coordinates, and store the results in CSV files. In cases of ‘Unmatched’ ROIs, those will be given unique indices too. The final correspondence is saved as
correspondence_indices.csvin the result folder.
Plots
From tri-axial plots we can see the ROI coordinates on original/ fixed, transformed/ moving, and registered phantom slices
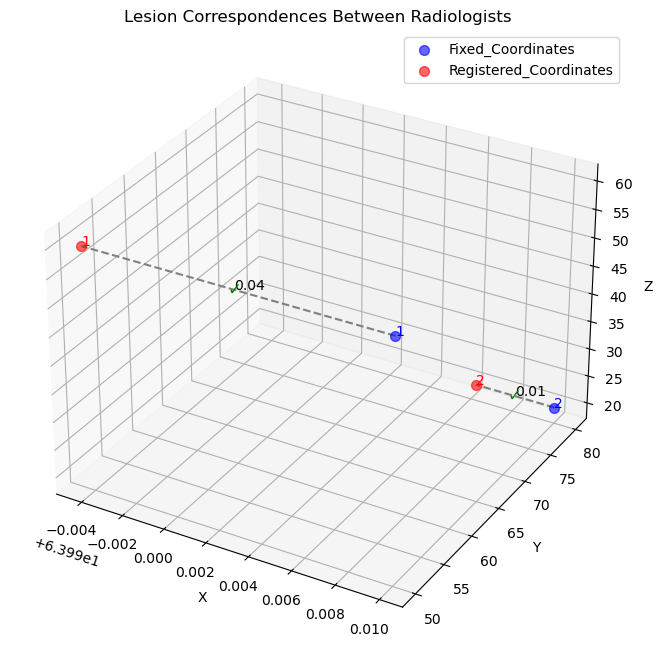
The correspondence of registered and original phantom coordinates are plotted after establishing correspondence.
We also plotted the metric value against number of iterations while conducting registration.
Conclusion
The RAMAC package offers a robust solution for automating matching and establishing correspondence between medical image datasets. By integrating registration and correspondence algorithms, it provides an efficient and comprehensive tool for ROI tracking in the longitudinal image data.
Import the libraries and the dependencies from the required scripts
[1]:
import sys
sys.path.append("../ramac")
from registration import *
from correspondence_csv_input import *
from transform_coordinates import *
from merge_dataframe import *
from phantominator import shepp_logan
from plots import *
from input_transform import *
from preprocessing import mask_air
from utils import *
#import warnings
import scipy
import numpy as np
import SimpleITK as sitk
import pandas as pd
import os
Following the instructions outlined in the Usage section, the test_transform_phantom script is created. This script exemplifies the process by which a volumetric phantom (referred to as the fixed image) is generated and populated with ROI coordinates. Subsequently, a predetermined transformation is applied, involving a 30° rotation around the X-axis followed by translations of 10 units along the Y-axis and 15 units along the Z-axis, resulting in the creation of the moving image along
with its associated coordinates. Importantly, users have the flexibility to utilize their own volumetric image data in this process. The ROI coordinates of both the fixed and moving images are then saved in CSV files within the result folder.
Volumetric registration is applied next and the registered image is achieved. The transformation matrix obtained during registration is applied on the moving image ROI cooridnates to obtain the registered cooridnates which is saved in result folder.Adaptive Hungarian algorithm is employed to establish correspondence between the ROI coordinates of the fixed and registered images. This algorithm effectively identifies corresponding ROI pairs and assigns unique nomenclature to unmatched ROI
coordinates. The results, including the established correspondence and uniqueness of the ROI sets, are saved as CSV files in the result folder. In the provided example, the successful alignment of the registered image with the fixed image post-registration is visually demonstrated through the triaxial plots, where two ROI landmarks (1st lesion and 2nd lesion) are highlighted with red dots in triaxial plot slices (X slice, Y slice and Z slice orientation) indicating perfect alignment
between the fixed and registered image slices.
[3]:
def test_transform_phantom():
# Create the original phantom
# Instead of creating the phantoms and placing the ROI coordinates the users can use their own image and corresponding
# CSV files as input
original_phantom, original_lesions = create_phantom_shepplogan()
# Define rotation and translation parameters
rotation_params = (np.pi/6, 0, 0) # Rotate 30 degrees around x axis i.e in yz plane
translation_params = (0, 10, 15) # Specify translation. Translation is done along y and z axes
# Transform the phantom to create moving image
transformed_phantom, transformed_lesions, transformed_lesions_1, transformed_phantom_1 = transform_phantom(original_phantom, original_lesions, rotation_params, translation_params)
# Print original and transformed lesion coordinates
print("Original Lesions:", original_lesions)
print("Transformed Lesions:", transformed_lesions)
## Lesion Index
lesion_index = [1,2]
result_folder = "../result"
os.makedirs(result_folder, exist_ok=True) # Create the result folder if it doesn't exist
# File paths for saving CSV files
filename_fixed = os.path.join(result_folder, 'fixed_coordinates.csv')
filename_moving = os.path.join(result_folder, 'moving_coordinates.csv')
filename_registered = os.path.join(result_folder, 'registered_coordinates.csv')
filename_correspondence = os.path.join(result_folder, 'correspondence_indices.csv')
# Save the fixed lesion coordinates
save_lesion_coordinates(original_lesions, lesion_index, filename_fixed)
# Save the moving lesion coordinates
save_lesion_coordinates(transformed_lesions, lesion_index, filename_moving)
## Perform pre-processing if required
#original_phantom = mask_air (original_phantom)
#transformed_phantom = mask_air (transformed_phantom)
## Apply the 3D rigid registration
moving_resampled, [init_transform, final_transform] = registration_3d_rigid_gradient_descent(original_phantom, transformed_phantom)
## Apply the final transform matrix to the ROI cooridnates of the transformed phantom
registered_coordinates = create_transformed_dataframe(filename_moving, final_transform)
save_transformed_dataframe(registered_coordinates, filename_registered)
### Application of Adaptive Hungarian Algorithm
threshold = 30
correspondences, unmatched_names_df1, unmatched_names_df2 = process_lesion_timepoints(filename_fixed, filename_registered, threshold)
plot_lesion_correspondences_timepoints(filename_fixed, filename_registered)
final_df = create_final_dataframe_timepoints(correspondences, unmatched_names_df1, unmatched_names_df2, filename_fixed, filename_registered)
df_transformed = merge_indices(final_df)
## Save the final correspondence in CSV file
df_transformed.to_csv(filename_correspondence, index=False)
### Visualization of the original, transformed and registered phantoms and their corresponding ROIs after registration
#transformed_lesions_rounded = round_coordinates_to_integer(transformed_lesions_1)
fixed_voxel = transform_physical_to_index(original_phantom, filename_fixed)
fixed_voxel_tuples = voxel_tuples_from_dataframe(fixed_voxel)
transformed_lesions_rounded = list_to_dataframe(transformed_lesions_1)
transformed_voxel = transform_physical_to_index(transformed_phantom_1, transformed_lesions_rounded)
transformed_voxel_tuples = voxel_tuples_from_dataframe (transformed_voxel)
registered_voxel = transform_physical_to_index(moving_resampled, filename_registered)
registered_voxel_tuples = voxel_tuples_from_dataframe(registered_voxel)
## If one needs to see all the slices of the volumetric image, one can use the compare_slices_interactive plot
#compare_slices_interactive(original_phantom, transformed_phantom_1, moving_resampled)
#plot_lesions_1 (original_phantom, transformed_phantom_1, moving_resampled, fixed_voxel_tuples, transformed_lesions_rounded, registered_voxel_tuples)
plot_lesions((original_phantom, fixed_voxel_tuples),
(transformed_phantom_1, transformed_voxel_tuples),
(moving_resampled, registered_voxel_tuples))
# Run test script
test_transform_phantom()
-------
Optimizer stop condition: RegularStepGradientDescentOptimizerv4: Step too small after 249 iterations. Current step (6.10352e-05) is less than minimum step (0.0001).
Iteration: 250
Metric value: -0.9495717158611641
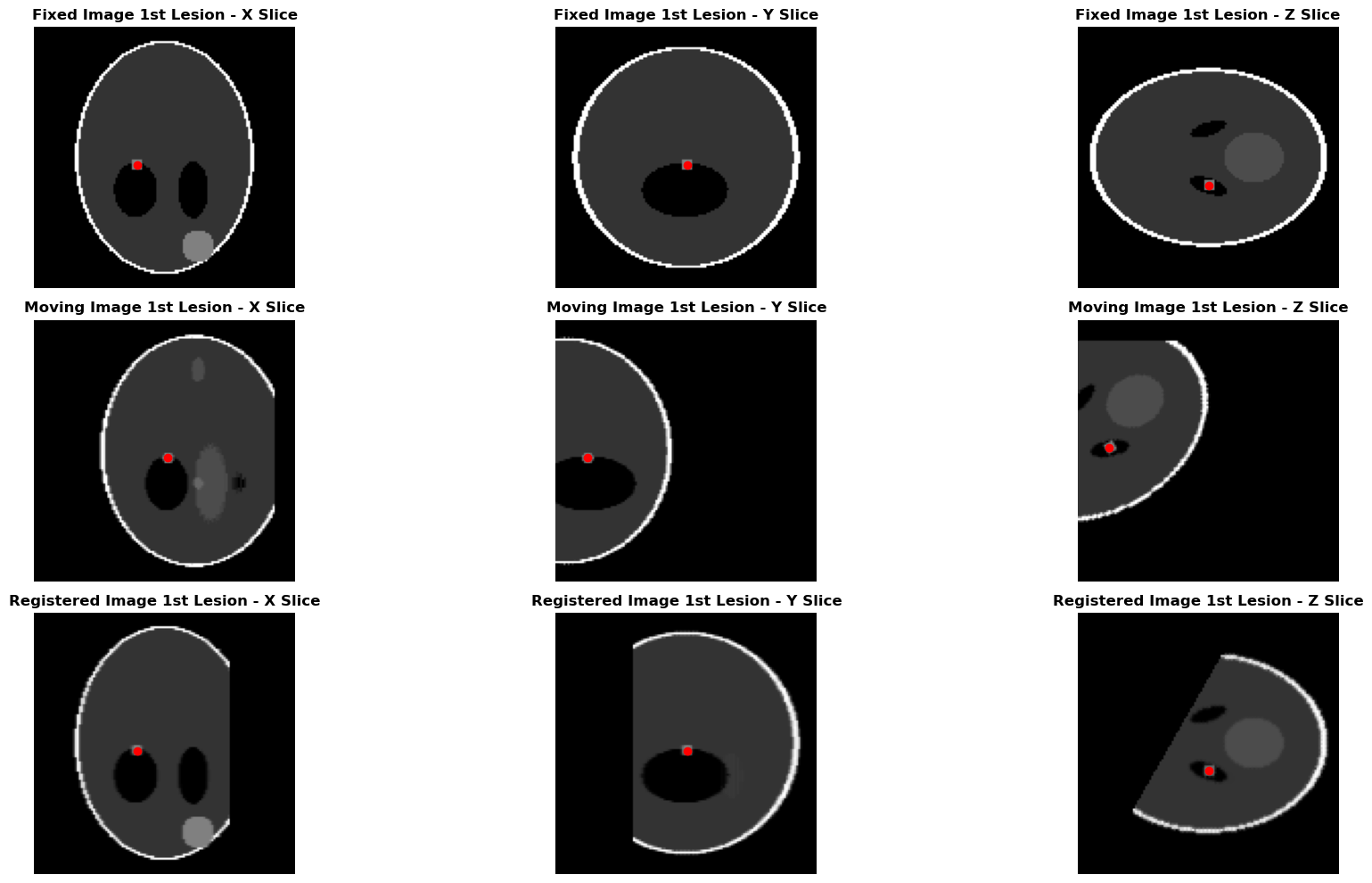
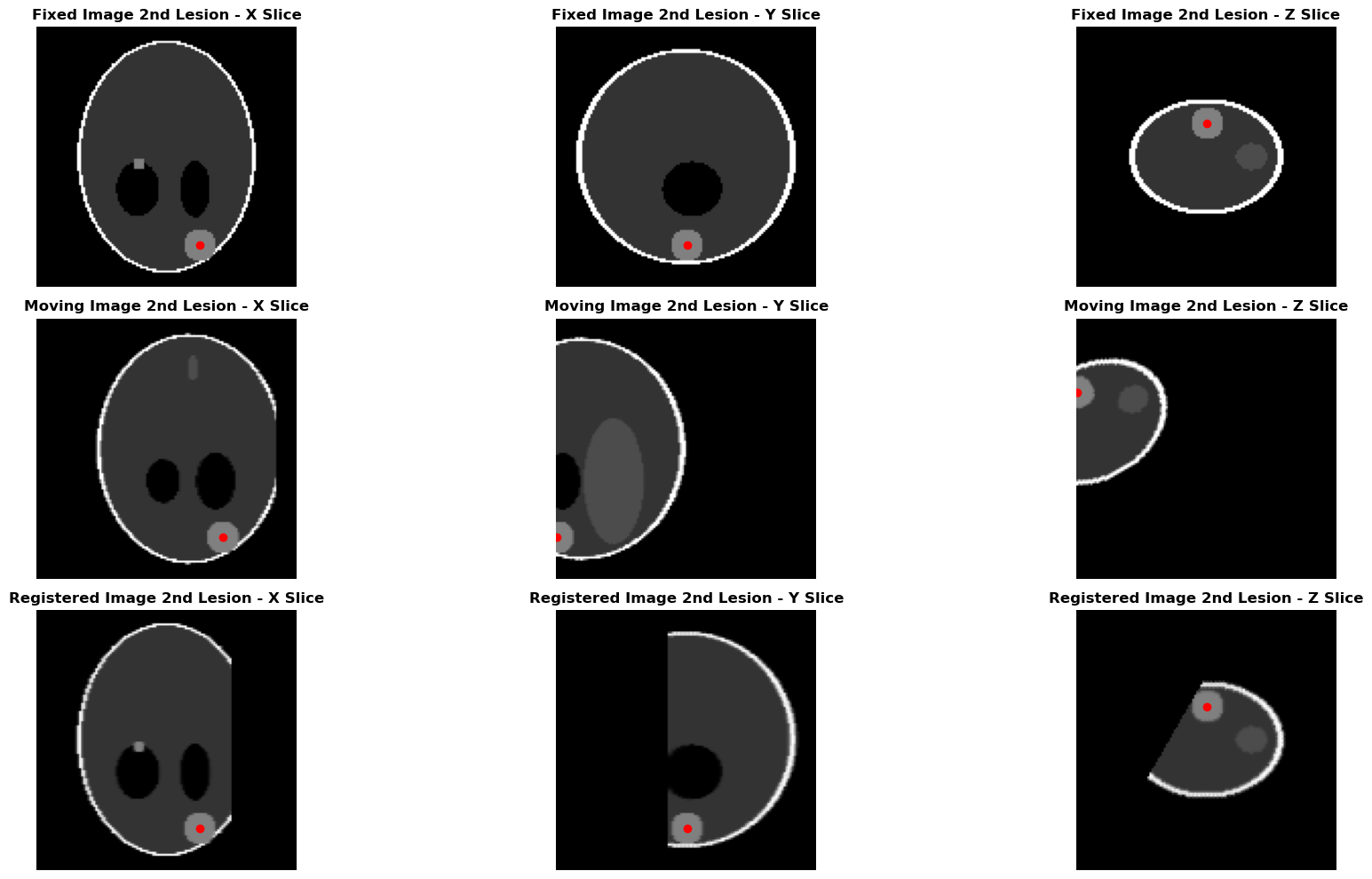
In the above example, each of the fixed and moving image has two lesions or annatomical landmarks. The lesions are denoted by red dots in three orientations (X, Y and Z) within the fixed and moving images (see the triaxial plots). Following the application of volumetric registration to the moving image, we obtain the registered image along with the corresponding registered coordinates. The lesions on the registered image slices in X, Y and Z orientation matches with the corresponding lesions of the fixed image as illustrated in the triaxial plots.
In Summary, the correspondence algorithm plot shows the 1st lesion of both the fixed and moving images bear correspondence and is treated as matching/same lesion. Same holds for the 2nd lesion in both the images. The final correspondence is saved as correspondence_indices.csv in the result folder.